Bộ Bánh Xe Mecanum Đa Hướng Cao Su Màu Đen Đường Kính 97mm kèm khớp nối trục động cơ – Giải pháp Di chuyển Linh hoạt cho Xe Robot
Bảng Thông Số Kỹ Thuật (Technical Specs)
| Thông số |
Giá trị |
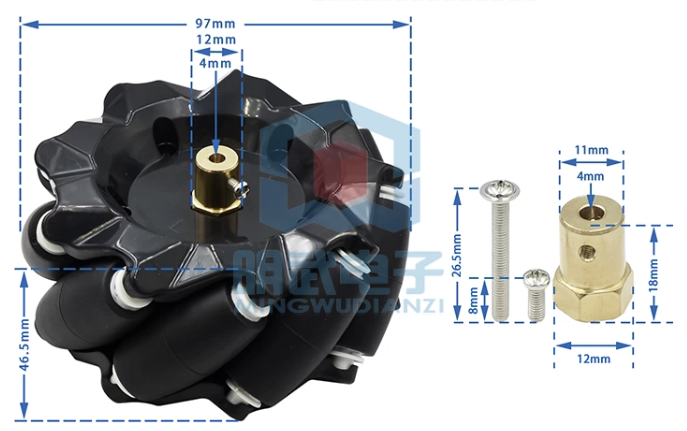
| Đường kính bánh xe |
97 mm |
| Bề rộng bánh xe |
46.5 mm |
| Chất liệu bánh chính |
Nhựa ABS cường lực |
| Chất liệu con lăn |
Cao su tổng hợp (cho độ bám tối ưu) |
| Số lượng con lăn mỗi bánh |
9 con lăn (tổng cộng 36 con lăn cho 4 bánh) |
| Loại khớp nối trục đi kèm |
Trục động cơ 4mm (có thể tùy chọn loại khớp nối khác tùy nhu cầu) |
| Tải trọng khuyến nghị (cho bộ 4 bánh) |
Tối đa 5 kg (phụ thuộc vào động cơ và thiết kế khung) |
| Màu sắc |
Đen |
| Trọng lượng 1 bánh |
~250 g |
Hướng Dẫn Lắp Đặt
Bộ Bánh Xe Mecanum là linh kiện cơ khí thụ động, không có "sơ đồ chân" theo nghĩa điện tử. Tuy nhiên, việc lắp đặt đúng cách là cực kỳ quan trọng để đảm bảo khả năng di chuyển đa hướng của robot:
- Lắp đặt bánh xe: Bộ sản phẩm bao gồm 2 bánh quay trái và 2 bánh quay phải. Đảm bảo lắp đặt đúng vị trí (thường là chéo nhau) để robot có thể di chuyển ngang, dọc, chéo và xoay tại chỗ. Các mũi tên trên bánh xe (nếu có) hoặc hướng của con lăn phải được định hướng chính xác.
- Khớp nối trục động cơ: Sử dụng khớp nối đi kèm để gắn bánh xe vào trục động cơ DC hoặc servo. Đảm bảo khớp nối được siết chặt và căn chỉnh thẳng hàng với trục động cơ để tránh rung lắc và mài mòn không đều.
- Hệ thống điều khiển: Để vận hành hiệu quả bánh xe Mecanum, bạn cần 4 động cơ riêng biệt (mỗi bánh một động cơ) và một bộ điều khiển vi xử lý (như Arduino, Raspberry Pi, ESP32) có khả năng tính toán kinematics ngược. Mỗi động cơ phải có khả năng quay độc lập về tốc độ và hướng.
Lời Khuyên của Kỹ Sư (Engineer's Tips)
- Đảm bảo tương thích trục động cơ: Trước khi mua, hãy kiểm tra đường kính trục động cơ của bạn. Mặc dù sản phẩm đi kèm khớp nối 6mm, nếu động cơ của bạn có trục khác (ví dụ: 3mm, 4mm, 5mm hoặc trục D), bạn sẽ cần mua thêm khớp nối phù hợp. RETOBOTS có cung cấp nhiều loại khớp nối trục động cơ để bạn lựa chọn.
- Hệ thống điều khiển phức tạp: Di chuyển đa hướng với bánh Mecanum đòi hỏi một thuật toán điều khiển (kinematics ngược) để chuyển đổi lệnh di chuyển mong muốn (X, Y, góc quay) thành tốc độ quay của từng bánh xe. Đừng lo lắng, có rất nhiều thư viện và mã mẫu có sẵn cho Arduino hoặc nền tảng khác để bạn bắt đầu.
- Nguồn điện và Driver mạnh mẽ: Với 4 động cơ hoạt động độc lập, đặc biệt là khi robot mang tải, yêu cầu dòng điện có thể rất lớn. Hãy chọn driver động cơ có khả năng chịu dòng cao (ví dụ: L298N, TB6612FNG cho động cơ nhỏ; hoặc driver công suất lớn hơn cho động cơ công nghiệp) và một nguồn cấp đủ công suất để tránh tình trạng sụt áp gây mất ổn định hoạt động.
- Bề mặt di chuyển: Bánh xe Mecanum hoạt động tốt nhất trên các bề mặt cứng và tương đối phẳng. Trên bề mặt gồ ghề hoặc quá mềm, hiệu suất di chuyển và độ chính xác có thể bị ảnh hưởng.
- Kiểm tra định hướng con lăn: Đây là điểm mấu chốt! Đảm bảo các con lăn trên bánh xe được định hướng đúng để tạo ra lực đẩy theo vector mong muốn. Lắp sai hướng bánh xe hoặc con lăn sẽ làm robot không thể di chuyển đa hướng như mong đợi.




