Bộ động cơ giảm tốc JGB37 12V Encoder 320rpm - Giải pháp cơ cấu chấp hành chuẩn xác cho Robot tự hành
Bộ động cơ giảm tốc JGB37 là linh kiện "xương sống" trong các thiết kế robot di động hạng trung. Với tích hợp Encoder xung chất lượng cao và bộ gá đỡ đi kèm, sản phẩm này giúp bạn hiện thực hóa các thuật toán PID, điều khiển vị trí và tốc độ một cách chính xác tuyệt đối mà không mất thời gian căn chỉnh cơ khí.
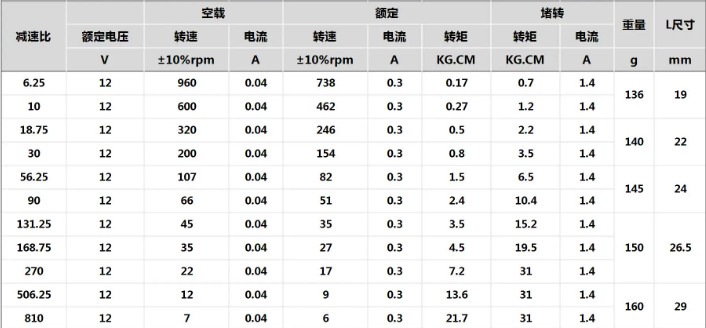
Thông số kỹ thuật (Technical Specs)
Sơ đồ chân & Đấu nối (Pinout)
- Dây Đỏ: Cấp nguồn Động cơ (+) (Đổi vị trí với dây Trắng để đảo chiều quay)
- Dây Đen: Cấp nguồn âm Encoder (-) → Kết nối vào GND của Vi điều khiển
- Dây Vàng: Tín hiệu Encoder kênh A (Xuất xung vuông tần số cao)
- Dây Xanh Lá: Tín hiệu Encoder kênh B (Xuất xung vuông tần số cao)
- Dây Xanh Dương: Cấp nguồn dương Encoder (+) → Kết nối nguồn 3.3V hoặc 5V của Vi điều khiển
- Dây Trắng: Cấp nguồn Động cơ (-) (Đổi vị trí với dây Đỏ để đảo chiều quay)
Lời khuyên của Kỹ sư (Engineer's Tips)
- Xử lý nguồn cấp Encoder: Chỉ cấp điện áp trong khoảng từ 3.3V đến 5V cho dây màu Xanh Dương. Tuyệt đối không được cấp nhầm nguồn của động cơ (12V) vào dây Xanh Dương hoặc dây tín hiệu (Vàng/Xanh Lá) vì sẽ gây cháy cảm biến Hall ngay lập tức.
- Xử lý nhiễu: Tín hiệu Encoder là tín hiệu xung tần số cao, hãy sử dụng dây cáp chống nhiễu hoặc bện xoắn các dây tín hiệu để tránh sai lệch giá trị đọc từ vi điều khiển khi động cơ hoạt động mạnh.
- Chọn lựa Driver phù hợp: Dòng điện khi kẹt (Stall Current) của động cơ đạt 1.4A. Để đảm bảo hệ thống vận hành bền bỉ, nên sử dụng các mạch cầu H chất lượng cao như TB6612, L298N hoặc các module MOSFET có dòng đỉnh trên 2A.
- Tính toán số xung trong Code PID: Vì tỷ số truyền chính xác của động cơ này là 18.75 và đĩa từ trả về 11 xung đơn mỗi vòng trục động cơ, khi lập trình thuật toán điều khiển vị trí/tốc độ, bạn cần khai báo hệ số xung là 206.25 xung/vòng đối với trục ra bánh xe (nếu đọc cả 2 cạnh lên/xuống hoặc dùng chế độ x4 xung thì nhân tương ứng).
- Đồng bộ hóa: Khi làm Robot tự hành, hãy đảm bảo rằng bạn đã đo kiểm tốc độ thực tế của cả 2 động cơ (trái/phải) vì sai số nhỏ giữa các động cơ cơ khí (~10%) là nguyên nhân chính khiến robot đi lệch quỹ đạo. Sử dụng các hàm hiệu chỉnh (Offset) trong code PID của bạn để bù đắp sự chênh lệch này.
Tại RETOBOTS, chúng tôi cam kết sản phẩm đã được kiểm tra xung Encoder trước khi đóng gói. Tải bộ thư viện PID và Code mẫu tại trung tâm hỗ trợ kỹ thuật để "Robot chạy ngay" chỉ sau 5 phút lắp đặt!










