Động Cơ Giảm Tốc TT 3-6VDC Trục Kim Loại, Có Encoder, 155rpm - Giải pháp truyền động chính xác cho Robot tự hành
Động cơ giảm tốc TT là "trái tim" vận hành cho các dòng robot giáo dục. Phiên bản nâng cấp với trục kim loại cứng cáp và tích hợp Encoder giúp bạn không chỉ điều khiển robot di chuyển, mà còn kiểm soát chính xác quãng đường và tốc độ thực tế, loại bỏ sai số trong thuật toán PID.
Bảng thông số kỹ thuật (Technical Specs)
| Thông số |
Chi tiết |
| Điện áp hoạt động |
6V - 9V DC |
| Tốc độ không tải |
155 RPM (tại 6V) |
| Tỷ số truyền |
1:48 |
| Momen xoắn |
1.2Nm |
| Dòng không tải |
~150mA (tại 3V) |
| Loại trục |
Trục kim loại |
| Encoder |
Encoder Hall kép pha AB |
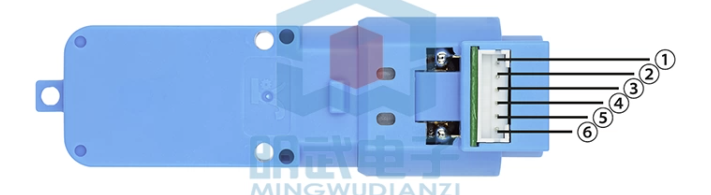
Sơ đồ chân & Đấu nối (Pinout)
- M+ (Chân số 5) và M- (Chân số 6): Cấp nguồn DC từ Driver (L298N, L293D hoặc TB6612FNG).
- Encoder VCC (Chân số 4): Cấp nguồn 3.3V hoặc 5V (tùy thuộc vào vi điều khiển).
- Encoder GND (Chân số 1): Nối chung GND với hệ thống.
- Encoder Out (A/B) (Chân số 2 và 3): Tín hiệu xung kỹ thuật số nối vào chân ngắt (Interrupt Pin) của vi điều khiển (STM32, ESP32,...) để đếm xung.
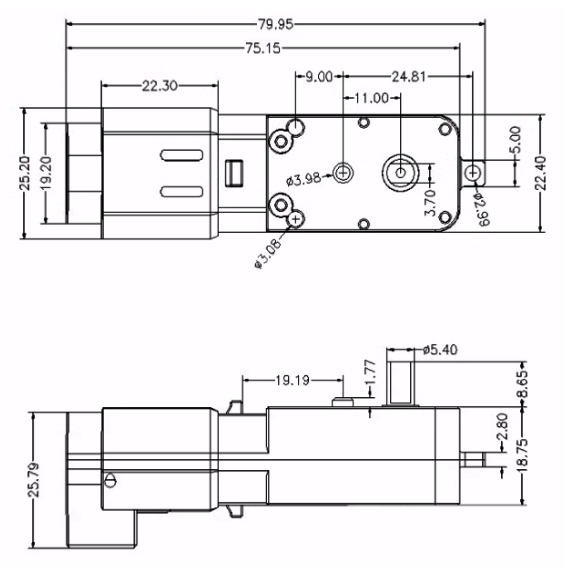
Kích thước
Lời khuyên của Kỹ sư (Engineer's Tips)
- Khử nhiễu: Động cơ DC tạo ra nhiễu điện từ rất lớn. Hãy luôn hàn thêm tụ gốm (0.1uF) vào hai cực motor và nối vỏ motor xuống GND để bảo vệ vi điều khiển khỏi tình trạng treo hoặc reset bất ngờ.
- Độ chính xác: Việc tích hợp Encoder cho phép bạn thực hiện thuật toán PID để robot chạy thẳng tuyệt đối dù hai bánh có độ ma sát không đều nhau. Đừng bỏ qua việc đo đạc số xung trên mỗi vòng quay (PPR) trước khi lập trình.
- Tương thích: Trục kim loại 3.7mm tương thích hoàn hảo với các dòng bánh xe TT tiêu chuẩn của RETOBOTS. Nếu bạn cần torque (lực kéo) cao hơn khi mang vác vật nặng, hãy cấp đủ 6V, nhưng cần lưu ý chọn Driver (ví dụ: Drv8833) chịu được dòng khởi động để tránh làm nóng mạch.
- Lưu ý an toàn: Không nên dừng đột ngột bằng cách đảo chiều điện áp (tự hãm) quá thường xuyên ở tốc độ cao, điều này sẽ làm giảm tuổi thọ bộ nhông nhựa bên trong.




