Mạch Điều Khiển Động Cơ L298N (Phiên bản Đỏ) - Điều khiển 2 động cơ DC/Step - Giải pháp điều khiển robot cơ bản
Mạch cầu H L298N là "trái tim" trong hệ thống truyền động của mọi chú robot sinh viên. Với khả năng điều khiển độc lập 2 động cơ DC hoặc 1 động cơ bước, đây là linh kiện không thể thiếu để hiện thực hóa các ý tưởng robot di chuyển từ sơ cấp đến trung cấp.
Vị trí trong Hệ thống 5 tầng kiến trúc: Tầng 4 - Hệ thống truyền động (Actuator/Driver System).
Bảng thông số kỹ thuật (Technical Specs)
| Điện áp điều khiển (VCC) |
5V - 35V DC |
| Dòng điện cực đại |
2A (Khuyến nghị thực tế nên dùng < 1.5A) |
| Công suất tiêu thụ |
25W (khi ở nhiệt độ môi trường 75°C) |
| Mức điện áp tín hiệu (Logic) |
5V TTL |
| Tích hợp ổn áp (5V Regulator) |
Có (Cấp nguồn 12V có thể lấy 5V ra từ chân này) |
| Kích thước |
43 x 43 x 27 mm |
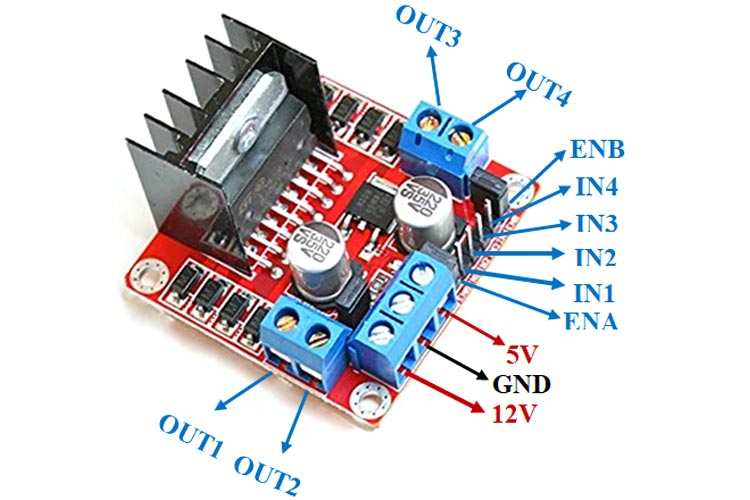
Sơ đồ chân & Đấu nối (Pinout)
- OUT1, OUT2: Kết nối với động cơ A.
- OUT3, OUT4: Kết nối với động cơ B.
- 12V input: Cấp nguồn dương cho động cơ (7V - 12V).
- GND: Cấp đất chung cho nguồn động cơ và vi điều khiển (BẮT BUỘC).
- 5V output: Nguồn 5V đầu ra (Dùng để cấp nguồn cho Arduino nếu nguồn 12V đủ khỏe).
- ENA, ENB: Chân điều khiển tốc độ (PWM) - Tháo Jumper nếu muốn dùng code điều khiển tốc độ.
- IN1, IN2, IN3, IN4: Chân nhận tín hiệu điều khiển chiều quay từ vi điều khiển.
Lời khuyên của Kỹ sư (Engineer's Tips)
- Quy tắc "Điểm mass chung": Đây là lỗi sai phổ biến nhất khiến mạch không chạy. Bạn phải nối chân GND của L298N với chân GND của Arduino/Vi điều khiển thì tín hiệu điều khiển mới có hiệu lực.
- Tránh sụt áp: Nếu bạn dùng nguồn Pin 9V (loại chữ nhật đen), mạch sẽ rất nhanh hết điện và không đủ dòng để khởi động động cơ tải nặng. Hãy ưu tiên dùng Pin Lipo 2S (7.4V) hoặc 3 pin 18650 để robot hoạt động ổn định nhất.
- Jumper ENA/ENB: Nếu bạn chỉ muốn robot chạy/dừng đơn giản, hãy giữ nguyên Jumper. Nếu muốn lập trình tăng giảm tốc độ (thông qua hàm analogWrite), hãy rút Jumper và nối chân ENA/ENB vào các chân PWM của Arduino.
- An toàn: Khi nạp code lần đầu, hãy nhấc bánh xe robot lên khỏi mặt đất để tránh việc robot bất ngờ "tự hành" gây hư hỏng thiết bị hoặc chấn thương.




